Graphical Radar Mark II Rebuild для Space Engineers
In-Game Script.
IMPORTANT: READ THE LIMITATIONS.
Credits to sysigy for large amounts of backend logic: check out his script here.
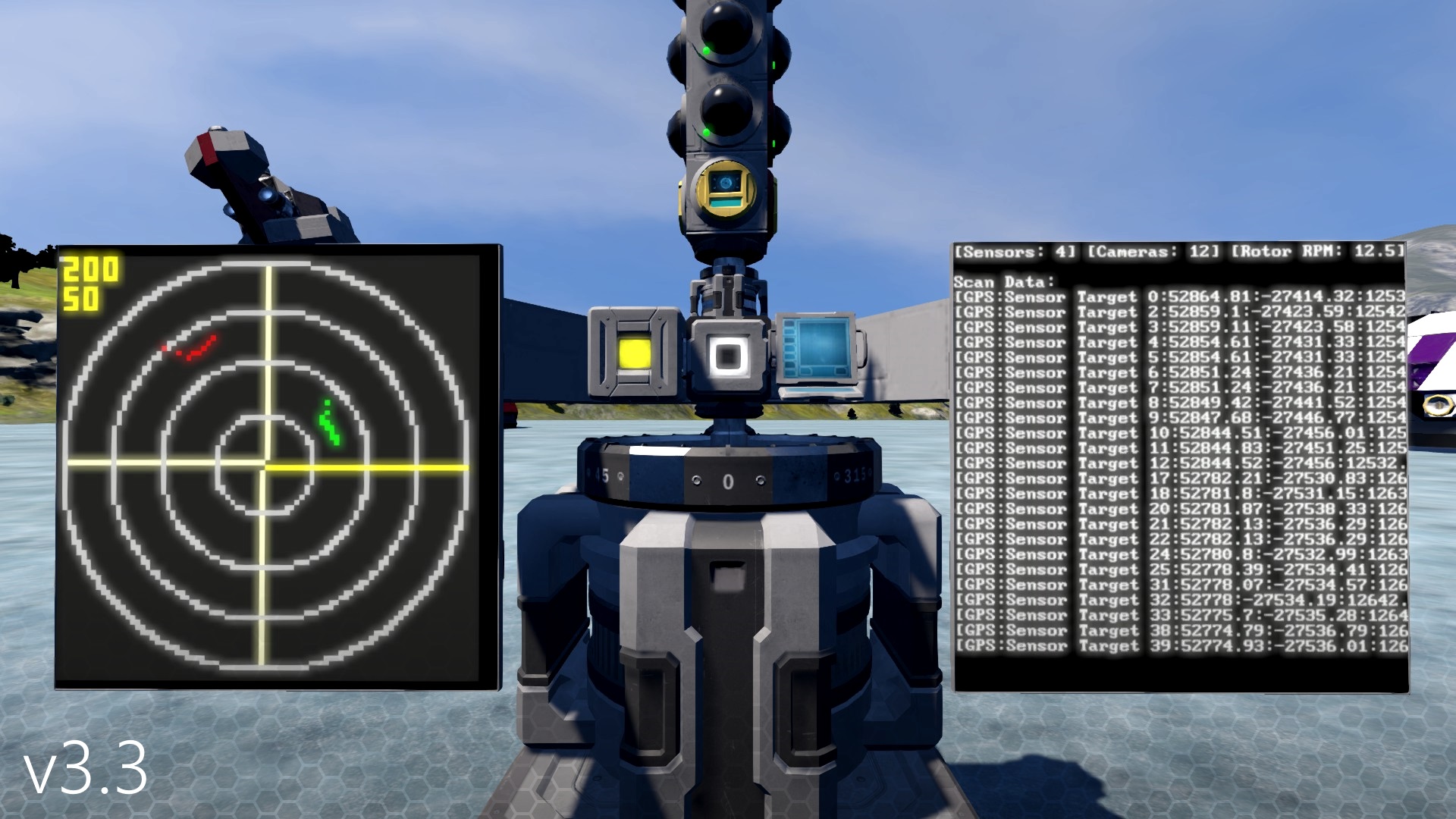
This script is a rebuild of Graphical Radar Script Mark II by alex-thatradarguy. It uses sensors and cameras on a rotor to detect targets - up to all four directions - and outputs them to any available radar displays.
The original script used a remote control's GetFreeDestination(), a function which was removed some time ago. This was the main reason it broke.
This script replaces it with a camera's Raycast() function. Advantages of this include slightly easier implementation and the ability to see anything with a collider (ships, terrain, trees, spiders, players, etc.). Disadvantages include a scan delay proportional to scan range, and the ability to see anything with a collider (like the ship it's attached to!).
All of the features of the original, and more!
Detectors
Sensor support - One sensor per direction is supported.
Camera support - Can support an infinite amount of cameras per direction! This allows for less delay between scans, and thus higher detail at range - at the cost of high overhead.
Automated configuration - The script automatically detects and sets up everything necessary except for what sensors pick up.
It is possible to have only a sensor in one direction, and only a camera in another.
Displays
Monospace colour support - Updated monospace colours courtesy of Whiplash141. The original visuals are also available.
Multiple displays - Can render to any display with the appropriate name tag - including large displays.
Enemy ID - Distinguishes between hostile and non-hostile targets.
Status display - Outputs formatted GPS coordinates of hits.
Adjustable resolution - Minimum of 40x, maximum of 160x. Large displays use 2x the set resolution.
Large displays - Can spread a single display's contents over four displays.
Multiple radar support - Change radar search tag in settings.
Backend
Argument handling - Configure camera range and rotor RPM through arguments.
Adjustable refresh rate - Higher rate => higher overhead.
Excessive amounts of any:
- LCDs
- LCD resolution
- Cameras
- Things in the general area
can cause the game to freeze - especially in combination. Use with caution.
(if anyone can tell me a way to fix this that would be appreciated ^_^)
Cameras use raycasts - i.e. will return the first thing directly in front if it. This means the camera array will only detect things in a flat-ish (dependent on the shape of the array) circle. It also means if any parts of the ship are on that circle, that's what the camera will see.
The multi-screen mode runs at 2x normal resolution. This may cause problems at high resolutions.
Required blocks
- 1 Rotor [Radar - Rotor]
- 1 Sensor [Radar - Sensor Front] OR 1 Camera [Radar - Camera Front]
- 1 LCD [See Optional Blocks for possible LCDs] (text panels are also LCDs)
- 1 Programming Block with this code
- 1 Power Source
Optional blocks
- 1-4 Sensors
- Radar - Sensor Front
- Radar - Sensor Back
- Radar - Sensor Left
- Radar - Sensor Right
- Multiple Cameras [Radar - Camera <Front/Back/Left/Right>...]
- Radar - Camera Front 1
- Radar - Camera Back 1
- Radar - Camera Left 1
- Radar - Camera Right 1
- Radar - Camera Front 2
- Radar - Camera Back 2
- etc...
- Multiple LCDs [Radar - <type> (position)...]
- Radar - Display
- Radar - Status
- Radar - Multi NW
- Radar - Multi NE
- Radar - Multi SW
- Radar - Multi SE
Rotor Setup
- Place rotor with name tag [Radar - Rotor].
- Place something to mount the sensors/cameras on the rotor.
If the rotor is upside-down relative to the display, change the appropriate variable in the script.
LCD Setup
- Place LCDs with any name tag:
- Radar - Display
- Radar - Status
- Radar - Multi NW
- Radar - Multi NE
- Radar - Multi SW
- Radar - Multi SE
Display is the single-screen radar display.
Multi is four-screen radar display - Multi NW is top-left, Multi NE is top-right, Multi SW is bottom-left, Multi SE is bottom-right.
Status is GPS position of detected objects.
Detector Setup
- On rotor, place sensors with any name tag:
- Radar - Sensor Front
- Radar - Sensor Back
- Radar - Sensor Left
- Radar - Sensor Right
At most one for each direction.
- On rotor, place cameras with any name tag:
- Radar - Camera Front 1
- Radar - Camera Back 1
- Radar - Camera Left 1
- Radar - Camera Right 1
- Radar - Camera Front 2
- Radar - Camera Back 2
- etc...
No limit for any direction apart from what your computer can take.
At 0 degrees, Front is up on any radar display, and the other directions at 90 degree increments.
Available Arguments
- inc c : increase camera range
- dec c : decrease camera range
- inc r : increase rotor RPM
- dec r : decrease rotor RPM
[alex-thatradarguy] Graphical Radar Script Mark II
[sysigy] Graphical Radar
[Whiplash141] Artifical Horizon
Graphical Radar Script Mark II Rebuild v3.5
IMPORTANT: READ THE LIMITATIONS.
Credits to sysigy for large amounts of backend logic: check out his script here.
Description
This script is a rebuild of Graphical Radar Script Mark II by alex-thatradarguy. It uses sensors and cameras on a rotor to detect targets - up to all four directions - and outputs them to any available radar displays.
The original script used a remote control's GetFreeDestination(), a function which was removed some time ago. This was the main reason it broke.
This script replaces it with a camera's Raycast() function. Advantages of this include slightly easier implementation and the ability to see anything with a collider (ships, terrain, trees, spiders, players, etc.). Disadvantages include a scan delay proportional to scan range, and the ability to see anything with a collider (like the ship it's attached to!).
Features
All of the features of the original, and more!
Detectors
Sensor support - One sensor per direction is supported.
Camera support - Can support an infinite amount of cameras per direction! This allows for less delay between scans, and thus higher detail at range - at the cost of high overhead.
Automated configuration - The script automatically detects and sets up everything necessary except for what sensors pick up.
It is possible to have only a sensor in one direction, and only a camera in another.
Displays
Monospace colour support - Updated monospace colours courtesy of Whiplash141. The original visuals are also available.
Multiple displays - Can render to any display with the appropriate name tag - including large displays.
Enemy ID - Distinguishes between hostile and non-hostile targets.
Status display - Outputs formatted GPS coordinates of hits.
Adjustable resolution - Minimum of 40x, maximum of 160x. Large displays use 2x the set resolution.
Large displays - Can spread a single display's contents over four displays.
Multiple radar support - Change radar search tag in settings.
Backend
Argument handling - Configure camera range and rotor RPM through arguments.
Adjustable refresh rate - Higher rate => higher overhead.
Limitations
Excessive amounts of any:
- LCDs
- LCD resolution
- Cameras
- Things in the general area
can cause the game to freeze - especially in combination. Use with caution.
(if anyone can tell me a way to fix this that would be appreciated ^_^)
Cameras use raycasts - i.e. will return the first thing directly in front if it. This means the camera array will only detect things in a flat-ish (dependent on the shape of the array) circle. It also means if any parts of the ship are on that circle, that's what the camera will see.
The multi-screen mode runs at 2x normal resolution. This may cause problems at high resolutions.
User Manual
Required blocks
- 1 Rotor [Radar - Rotor]
- 1 Sensor [Radar - Sensor Front] OR 1 Camera [Radar - Camera Front]
- 1 LCD [See Optional Blocks for possible LCDs] (text panels are also LCDs)
- 1 Programming Block with this code
- 1 Power Source
Optional blocks
- 1-4 Sensors
- Radar - Sensor Front
- Radar - Sensor Back
- Radar - Sensor Left
- Radar - Sensor Right
- Multiple Cameras [Radar - Camera <Front/Back/Left/Right>...]
- Radar - Camera Front 1
- Radar - Camera Back 1
- Radar - Camera Left 1
- Radar - Camera Right 1
- Radar - Camera Front 2
- Radar - Camera Back 2
- etc...
- Multiple LCDs [Radar - <type> (position)...]
- Radar - Display
- Radar - Status
- Radar - Multi NW
- Radar - Multi NE
- Radar - Multi SW
- Radar - Multi SE
Rotor Setup
- Place rotor with name tag [Radar - Rotor].
- Place something to mount the sensors/cameras on the rotor.
If the rotor is upside-down relative to the display, change the appropriate variable in the script.
LCD Setup
- Place LCDs with any name tag:
- Radar - Display
- Radar - Status
- Radar - Multi NW
- Radar - Multi NE
- Radar - Multi SW
- Radar - Multi SE
Display is the single-screen radar display.
Multi is four-screen radar display - Multi NW is top-left, Multi NE is top-right, Multi SW is bottom-left, Multi SE is bottom-right.
Status is GPS position of detected objects.
Detector Setup
- On rotor, place sensors with any name tag:
- Radar - Sensor Front
- Radar - Sensor Back
- Radar - Sensor Left
- Radar - Sensor Right
At most one for each direction.
- On rotor, place cameras with any name tag:
- Radar - Camera Front 1
- Radar - Camera Back 1
- Radar - Camera Left 1
- Radar - Camera Right 1
- Radar - Camera Front 2
- Radar - Camera Back 2
- etc...
No limit for any direction apart from what your computer can take.
At 0 degrees, Front is up on any radar display, and the other directions at 90 degree increments.
Available Arguments
- inc c : increase camera range
- dec c : decrease camera range
- inc r : increase rotor RPM
- dec r : decrease rotor RPM
Credits
[alex-thatradarguy] Graphical Radar Script Mark II
[sysigy] Graphical Radar
[Whiplash141] Artifical Horizon